
 搜索
搜索  数字报
数字报  深圳号
深圳号  投诉举报
投诉举报  深圳特区报&读特记者 陈震霖
深圳特区报&读特记者 陈震霖
记者从深圳企业奥比中光获悉,近日于杭州举办的全球机器人领域重要学术会议 IROS 2025 上,多篇被大会收录的研究在数据采集或系统集成环节使用了3D视觉方案,研究方向涵盖自动化扫描、空间建模、人机交互等,折射出深圳3D视觉企业在全球机器人与AI视觉研究中的持续影响力。
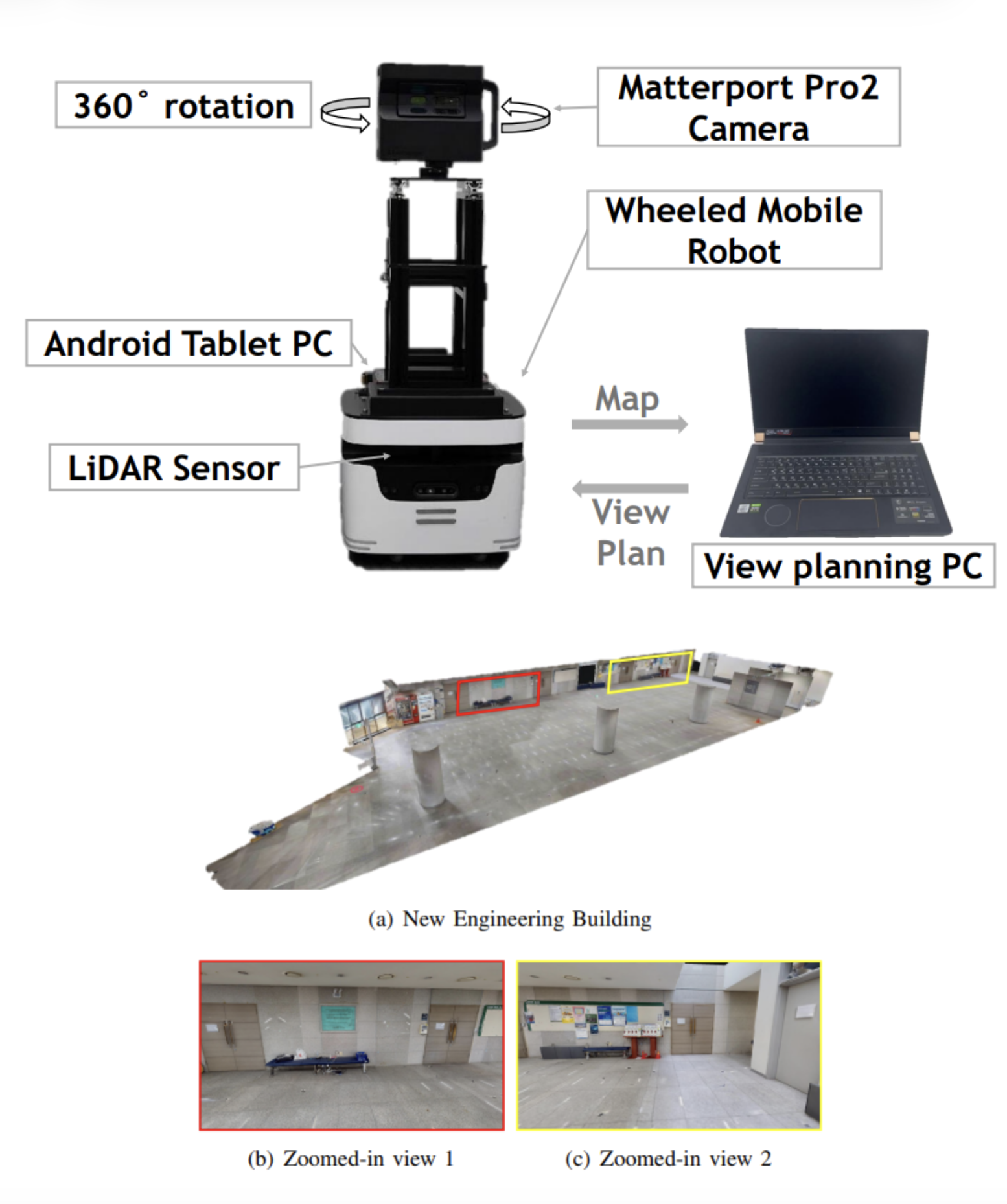
据介绍,韩国梨花女子大学团队提出“Scanning Bot”系统用于高效室内三维扫描与重建。论文显示,团队采用全景RGB-D系统(文中示例为 Matterport Pro2),在覆盖率与总时长等指标上实现优化,Pro2 系统内嵌奥比中光 Astra 相机模组。
上海交通大学团队提出零样本时序交互定位方法“EgoLoc”,面向第一视角视频的人机协作研究,方法融合2D/3D观测并利用手部三维速度等动力学先验定位“接触/分离”时刻。该研究在训练数据采集环节使用了奥比中光 Femto Bolt 相机。
从工程化能力看,奥比中光公开资料显示,其相机支持开放 SDK 与 ROS 2 封装、多机位时间同步与可调参的深度质量控制,并针对弱光、低纹理、反光材质等复杂环境做了稳定性优化,有利于科研结果复现与落地。
本届 IROS 聚焦具身智能、多模态感知与人机协作等主题,强调感知—认知—行动的深度融合。大会在杭州国际博览中心举办,与会者超过8000人。
作为深圳本土成长的3D视觉企业,奥比中光在结构光、iToF、双目、dToF、激光雷达及工业三维测量等技术路线均有布局。公司对外披露服务客户超过3000家,并持续参与国内外学术与产业交流,推动3D视觉在机器人、自动化与人机协作领域的融合创新。
(受访单位供图)
编辑 白珊珊 审读 张雪松 二审 王雯 三审 赵明
 报料
报料 推荐阅读



 读特热榜
读特热榜  IN视频
IN视频 




 鹏友圈
鹏友圈 





 iPhone客户端
iPhone客户端  安卓客户端
安卓客户端 
