
 搜索
搜索  数字报
数字报  深圳号
深圳号  投诉举报
投诉举报  读特新闻记者 严偲偲
读特新闻记者 严偲偲
5月1日,中国科学院深圳先进技术研究院集成所研究员徐天添联合深圳大学副教授王奔、香港中文大学教授张立,在《自然—生物医学工程》上发表最新研究。合作团队开发了一种受外界可编程磁场驱动的仿生血凝胶纤维机器人,能够在极端狭窄的脑脊液环境中多模态仿生运动,并结合X射线影像引导,精准无创到达肿瘤区域完成药物靶向递送,为大脑颅内肿瘤的精准、无创治疗开辟了全新路径。
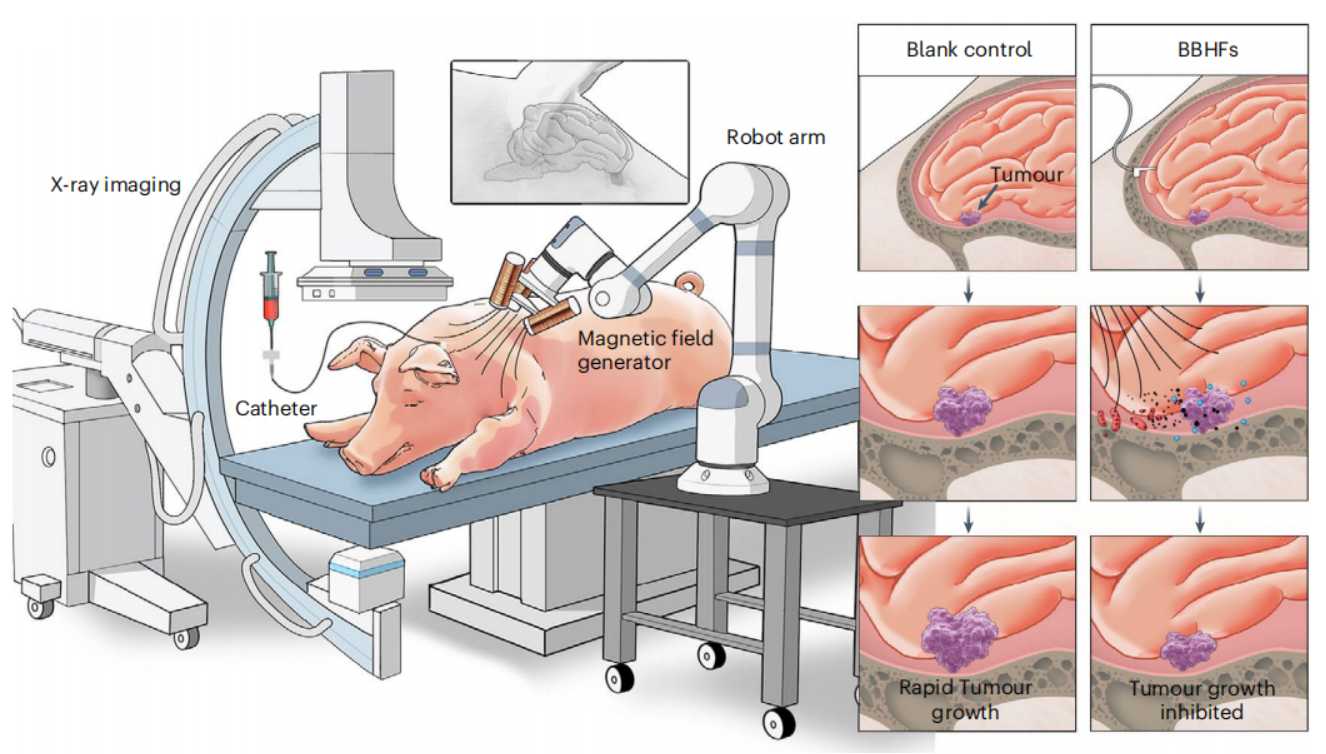
X射线成像引导血凝胶纤维机器人颅内肿瘤靶向治疗示意图。研究团队供图
微型机器人直径仅1毫米
近年来,微型机器人在医疗领域取得了显著进展,可实现体内远程靶向药物递送或局部治疗。然而,大脑的结构高度复杂,布满密集且不规则的脑沟回、脆弱的神经组织,以及毫米级间隙的蛛网膜下腔,对微型机器人的运动模式、柔性适配性和组织安全性提出了极高要求。
为此,研究团队以自然界中的线虫为灵感,创新性地利用实验动物自身血液与少量磁性粒子混合,通过原位凝胶化技术,制备出了直径为1毫米的血凝胶纤维机器人(BBHF)。
“BBHF保留了血液中天然纤维蛋白的网络结构,具有良好的生物相容性,可有效避免免疫排斥反应。同时,它以超柔性水凝胶为基体,具有显著的弹性和柔软性,比肠道更柔软,比软骨更有韧性。”论文通讯作者徐天添介绍,这些特性使BBHF既能像软体线虫一样,在比自身直径还小的狭窄空间中穿行,又不会因过硬而划伤周围的组织,为体内极端狭窄迂曲的生理环境下的无创输送提供了一条有效途径。
通过模仿线虫的细长形态和自适应的波浪运动机制,研究人员通过外界可编程驱动磁场实现了BBHF的精确控制,使其能够实现摆动、爬行和滚动等多种仿生运动模式。
在3D打印的人体脑沟回模型实验中,BBHF沿着预设路径成功穿越多级沟壑;在离体猪脑皮层实验中,BBHF通过动态调节运动方向和运动模式成功到达预定目标,全程未对柔软组织造成机械损伤。
磁驱遥控机器人在大脑内递药
作为治疗颅内肿瘤最关键的一步,就是如何让BBHF在到达肿瘤区域后,释放抗肿瘤药物。
为此,研究团队提出通过高频交变磁场,诱导血凝胶纤维机器人断裂碎化,以达到药物释放。“这相当于给血液凝胶机器人装上了‘卫星导航系统’,实现靶向给药。”徐天添介绍,这种基于物理场响应的智能释药策略,避免了传统化学触发剂的生物毒性,为肿瘤局部化疗提供了高时空精度的操控手段,未来可拓展应用于脑胶质瘤的边界浸润治疗、多病灶接力式给药等复杂医疗场景,在提升疗效的同时显著降低全身毒副作用。
为验证血凝胶纤维机器人在颅内肿瘤靶向治疗中的可行性与疗效,研究人员在18头小型猪中构建了脑胶质瘤模型,进行分组实验。研究团队发现,术后26天,BBHF治疗组的肿瘤生长受到抑制,比对照组肿瘤小4倍,同时活猪血细胞数量和生物化学标志物水平均保持在正常水平,进一步验证了猪自身血液制备的纤维机器人具有良好的生物相容性。
“基于患者自身血液定制的仿生血凝胶纤维机器人,能够逃避免疫排斥反应,并且在完成任务后可在体内自动降解,无需二次取出。”徐天添补充道。
未来,团队将进一步聚焦于血液凝胶纤维机器人的结构优化、运动控制精度提升及治疗功能增强,拓展其在复杂脑环境中的适应能力,推动其向个性化无创颅内治疗的临床应用转化。
编辑 孔盼成 审读 伊诺 二审 郑蔚珩 三审 张颖
 报料
报料 



 读特热榜
读特热榜  IN视频
IN视频 


 鹏友圈
鹏友圈 






 iPhone客户端
iPhone客户端  安卓客户端
安卓客户端 
