
 搜索
搜索  数字报
数字报  深圳号
深圳号  投诉举报
投诉举报  深圳特区报记者 闻坤
深圳特区报记者 闻坤
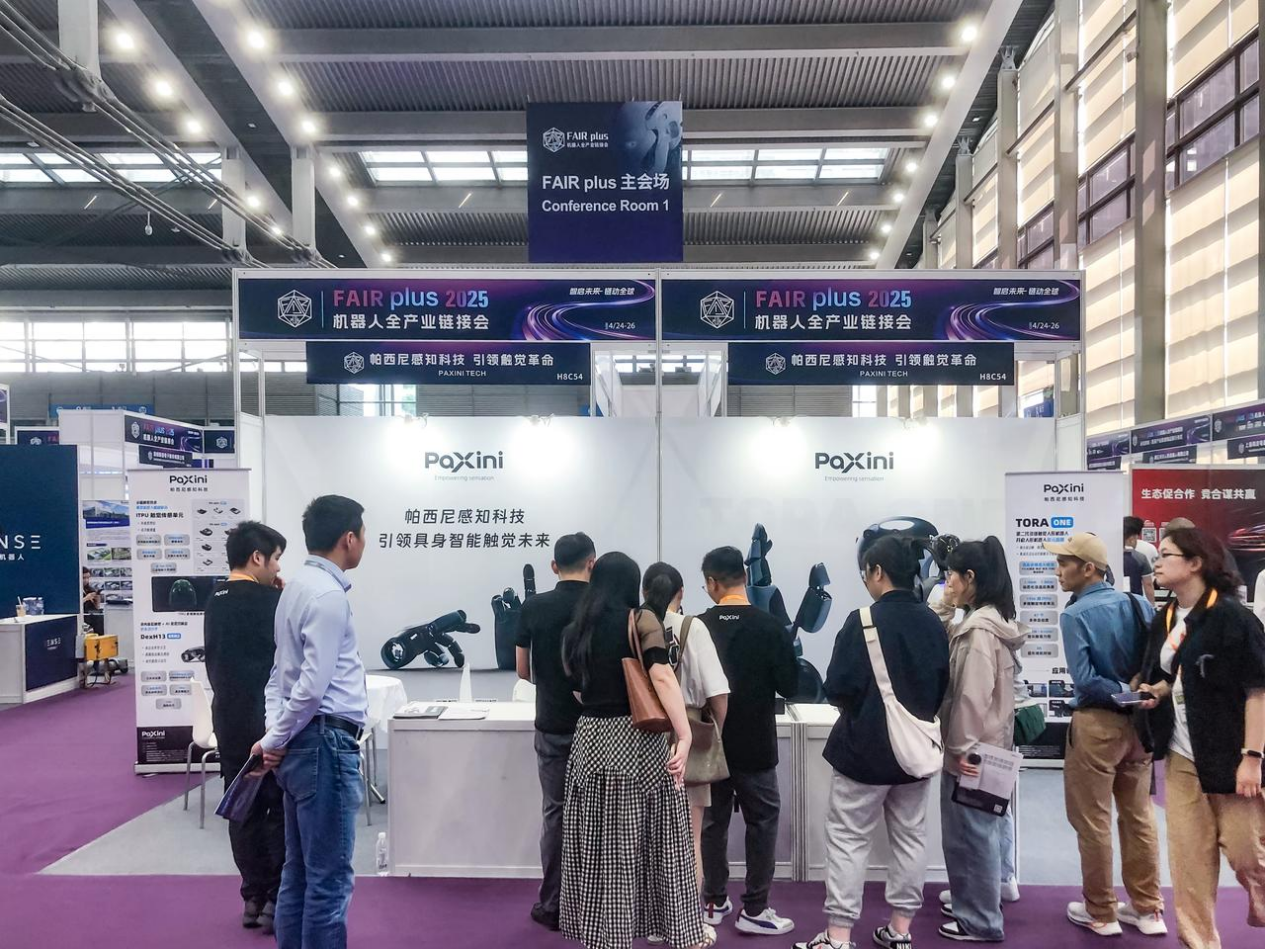
4月24日-26日,机器人全产业链接会(FAIR plus 2025)在深圳召开。凭借行业领先的技术创新和应用价值,帕西尼旗下多维触觉灵巧手 DexH 13、多维触觉人形机器人TORA-ONE一经亮相,就吸引了众多到场嘉宾驻足体验互动。
本次大会上,帕西尼展出了全球首款“多维触觉+AI 视觉”双模态机器人末端——多维触觉灵巧手 DexH13。它单手集成 1140 个 ITPU 多维触觉传感单元,能够实现多维阵列力感知及材质、温度、纹理等15种物理属性实时解析。同时,创新采用4指16自由度(13 主动 +3 被动)仿生机械结构设计, 其中拇指独立4主动自由度,在省去冗余小拇指的基础上,可完成超90%的核心手部动作。另外,手部搭载800万像素高清手眼相机,配合柔顺灵活的运控能力及高精度力控,可精准实现抓、握、捏、按、手指开合等复杂动作,完美执行易碎品抓取、精密装配等高难度复杂操作。

帕西尼这次还带来了业界首款多维触觉人形机器人 TORA-ONE 。它全身拥有 53 个自由度,配置多自由度灵活双臂和 4 指仿生灵巧手。 双手搭载了 2000 多个 ITPU 多维触觉传感单元,加持先进的 VTLA-Model(视觉-触觉-语言-动作多模态感知模型)与 PX-Core,赋予机器人精细灵敏的全面感知能力与强大的交互能力,从而能够快速自主学习和适应不同环境,完成多种场景下的柔顺灵活交互协作。
此外,TORA-ONE底盘和躯干采用高度模块化结构设计,可根据不同的场景使用需求,实现功能的灵活配置与场景的精准适配,其腰部结构可自如折叠,1.46米-1.86米自适应身高满足多种高度空间作业所需,可广泛应用于工业制造、精密制造、医疗康养、仓储物流等多种场景。
纵览全球人形机器人发展局势,“高精度触觉感知”已成为新的核心突破口。作为行业先行者,帕西尼已构建起包含高精度多维度触觉感知硬件平台、高质量大规模且极度稀缺的触觉多模态数据集 Motionsharing DataBase 以及多模态具身智能模型 TacFlow Engine 等在内的智能感知技术生态。三大核心板块相互协作、循序促进,不仅为帕西尼持续拓展人形机器人终端落地和场景应用奠定坚实基础,且有望进一步助推触觉传感领域加速实现“从技术突围到生态构建”的国产替代。
(受访单位供图)
编辑 杨渝嘉 审读 张雪松 二审 党毅浩 三审 王敏
 报料
报料 


 读特热榜
读特热榜  IN视频
IN视频 




 鹏友圈
鹏友圈 





 iPhone客户端
iPhone客户端  安卓客户端
安卓客户端 
