
 搜索
搜索  数字报
数字报  深圳号
深圳号  投诉举报
投诉举报  深圳特区报记者 吴亚男
深圳特区报记者 吴亚男
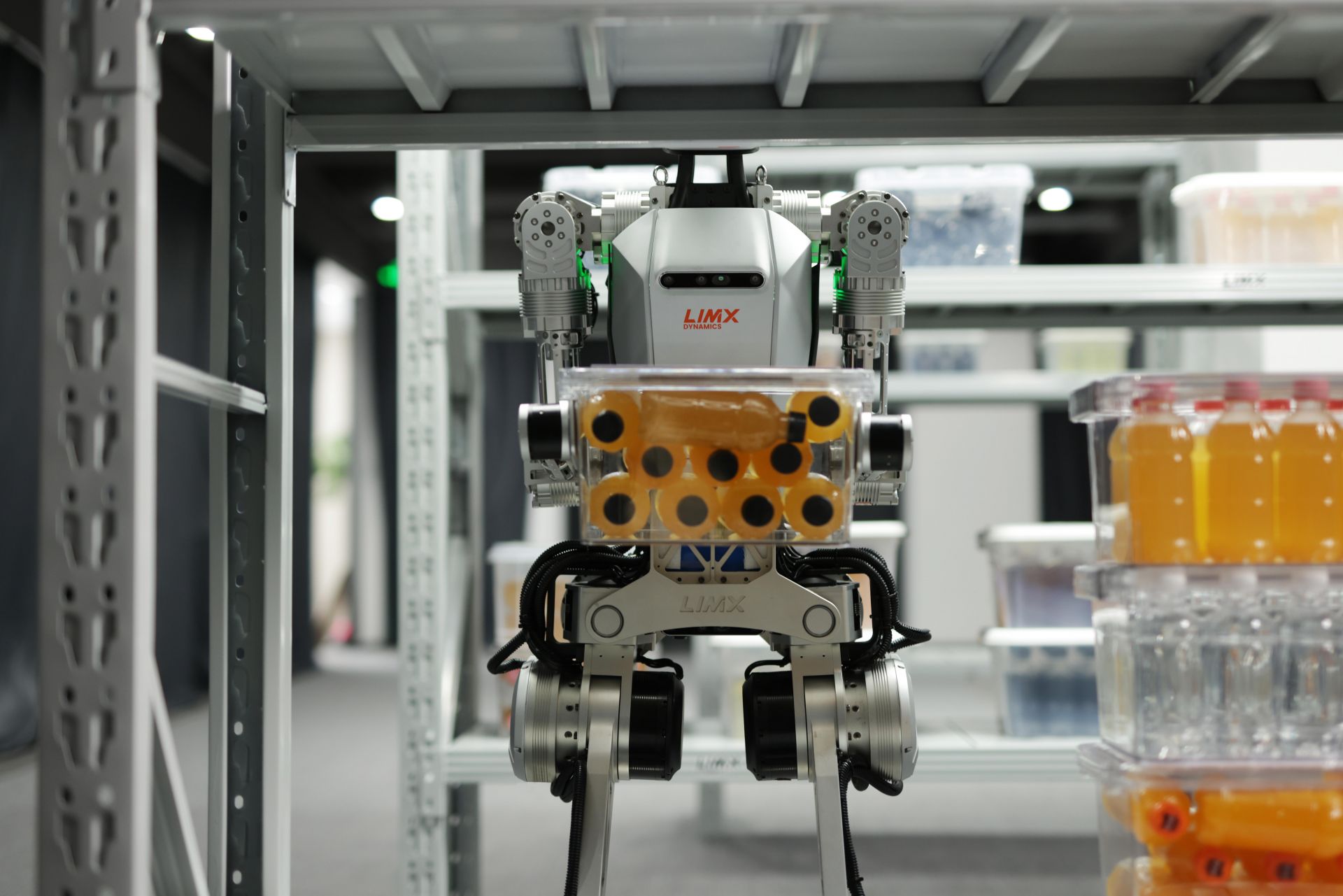
近日,深圳科技企业逐际动力公布了全尺寸人形机器人CL-1全身移动操作的最新技术进展。此次CL-1身处模拟仓库,在堆满货物的多重货架之间,全程连续无间断地完成一系列大负载、大范围的搬运任务,这标志着逐际动力具身智能技术的进一步提升。

在逐际动力公布的视频中,模拟仓库为人形机器人CL-1的感知决策和全身移动操作能力带来了一系列的考验和挑战。在无保护状态下,CL-1从静止开始加速,在空间受限的过道上,一路小跑进入模拟仓库,在货架前平缓减速,跑步和行走状态的切换自然平稳。
其间,CL-1不仅要适应自身与操作台(高73cm)、上下两层货架(高50cm和130cm)之间大跨度的操作高度变化,还要协调全身动作,处理好动态大负载操作时的平衡问题。为了实现货物在操作台、高低层货架间的移动,CL-1以多种不同的姿态进行处理,包括无负重浅蹲、负重站起、负重深蹲、负重举起、负重行走等。

在整个过程中,人形机器人CL-1有效应对自身运动姿态、承重位置及负载重量改变带来的挑战,通过对全身运动的全局规划和协调,始终保持身体的平衡及动作的稳定和高效,展现出多任务执行的泛化能力。

在仓库环境中,多层结构的货架与种类繁多的货物,会阻碍机器人对目标物品的识别;工作人员和货物的移动,可能导致碰撞或对机器人的操作路径造成干扰。机器人在进行搬运操作时,货物重量的变化还会影响自身的平衡和姿态。因此,不论是准确定位物品,还是根据货物状态即时调整自身姿态及动作,都需要机器人具备精准的实时目标感知能力。
以本次一镜到底的演示为例,在CL-1已经完成货物定位并即将进行操作时,工作人员移动了货物的位置,打断了CL-1的操作。运用基于实时感知的移动操作,CL-1实现了移动状态下的物体识别、任务规划和协调控制的闭环,通过实时反馈,有效排除了不可预见的外部干扰,重新定位目标货物,并自主重新规划任务路径,调整身位,将货物准确地放到了任务指定的位置上。
“随着算法和硬件性能的不断提升,逐际动力在具身智能机器人技术路径上的优势得到进一步释放和显现。逐际动力的全身运动控制策略聚焦泛化能力的提升,为不确定场景下的移动操作提供系统化解决方案,将有效降低部署难度,使机器人能够更快速落地现有场景设施。” 逐际动力有关负责人介绍,未来,逐际动力将持续深耕全身移动操作技术,进一步提升具身智能稳定性以及在复杂环境中的泛化能力,为通用人形机器人在实际应用场景中的广泛应用奠定坚实基础。
(受访单位供图)
编辑 刘彦 审读 秦天 二审 党毅浩 三审 周国和
 报料
报料 


 读特热榜
读特热榜  IN视频
IN视频 




 鹏友圈
鹏友圈 






 iPhone客户端
iPhone客户端  安卓客户端
安卓客户端 
