
 搜索
搜索  数字报
数字报  深圳号
深圳号  投诉举报
投诉举报  读特新闻记者 严偲偲
读特新闻记者 严偲偲
软体机器人由于具有高灵活性和变形能力,在医疗服务、人机交互、药物治疗等领域具有广泛的应用价值,然而其在精准控制、材料选择、生物相容性和安全性等方面仍需进一步研究和优化。
北京时间3月11日,中国科学院深圳先进技术研究院医工所徐海峰团队在纳米领域顶级期刊《美国化学学会—纳米》杂志上发表最新研究成果。研究团队开发了一种用于靶向递药的磁驱软体机器人,能根据器官内不同“地形”的特点,运用与环境最安全的交互方式,进行高效安全的生物货物转运和释放。
“药物输送系统或手术器械必须克服小腔道内复杂的结构形貌,例如平坦区域、褶皱和狭窄通道。在输卵管等小腔道内进行细胞或药物的转运,面临着更复杂的体内环境,这对手术器械或软体机器人的精度提出了更高要求。”徐海峰介绍道。
在该研究中,科研人员提出一种在输卵管内进行靶向药物输送的新手段,利用磁驱微型软体机器人在行进中进行原位编程和运动模态的切换,以适应输卵管中复杂环境的变化,最终穿过狭小空间,进行可控的药物释放。
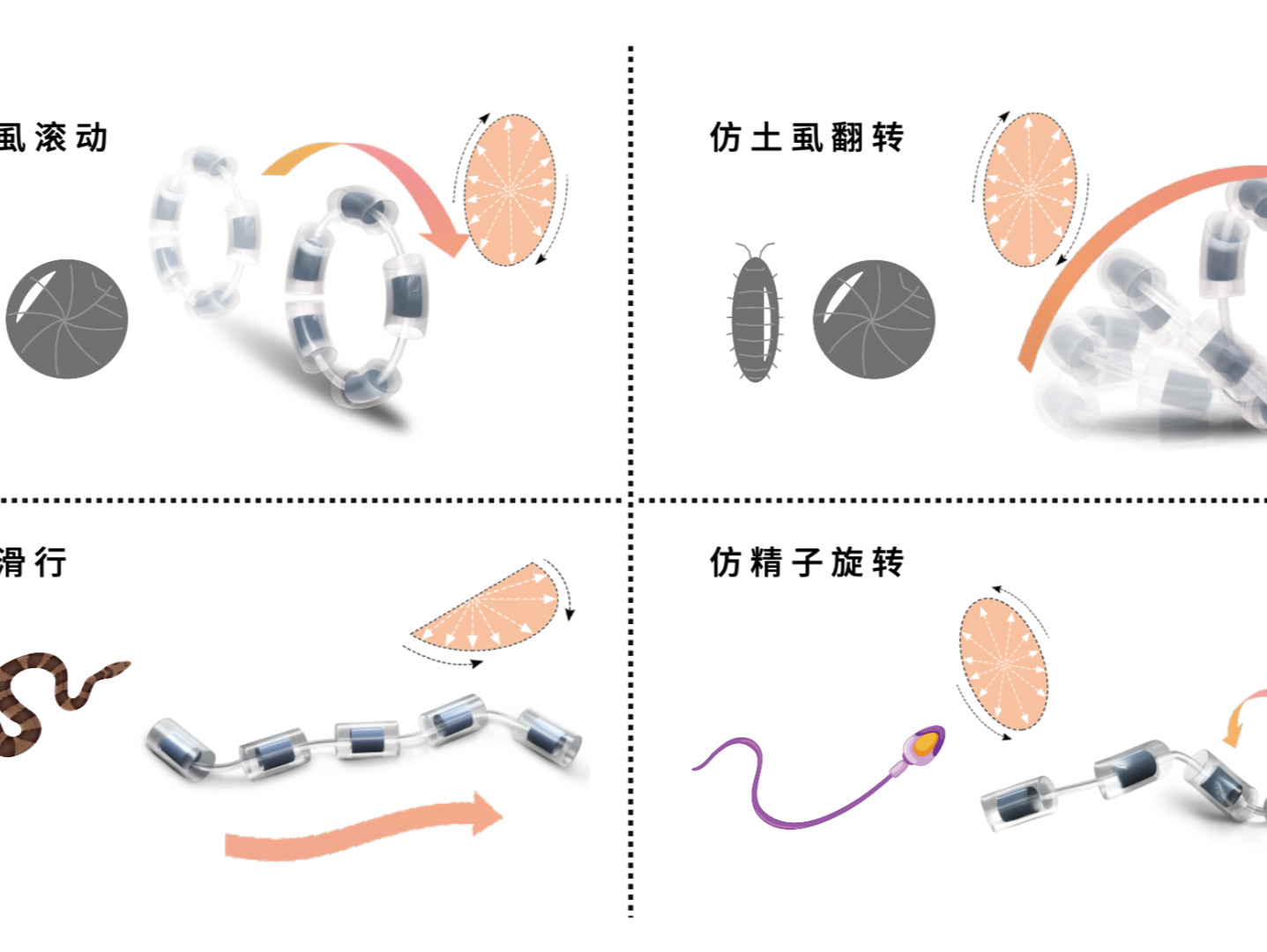
软体机器人可实现翻滚、旋转、蛇形等多运动模态。
“这一微型机器人可以在具有复杂内部结构和复杂表面形貌的输卵管中有效地导航。单个毫米机器人可实现多个运动模态,包括仿土虱滚动和翻转、仿精子旋转和仿蛇滑行,分别用于通过不同的障碍物场景,如平坦区域和狭窄通道等。”研究团队成员刘源介绍道。
据悉,该软体机器人的滚动模态可实现高速运动,速度可达每秒23毫米。药物释放既可以通过溶解缓慢释放,也可以通过激光在14秒内快速释放。该研究为人体内难以进入的小腔道环境的精准医疗诊断应用带来新方向,减少了微组织损伤和药物副作用。
在验证实验中,研究团队利用离体猪输卵管模拟真实生理环境,通过控制微型软体机器人执行自适应多模态运动和药物递送。实验结果表明,在磁场下,微型机器人朝着目标区域前进,在100秒内运动了55毫米,在目标区域快速释放药物,展示了这一新型机器人对输卵管环境的适应性。
进一步地,研究团队成功验证了微型机器人对于这一特定应用场景的适用性,证明了微型软体机器人通过局部区域内生物货物释放以治疗女性上生殖道疾病(例如肿瘤、粘连、感染和炎症)的潜力。
“接下来,我们希望将其与微纳机器人、微创手术器械整合,开发一种可以跨尺度进行生物样本体内靶向转运的机器人系统,有望为细胞治疗、辅助生殖等精准医疗技术提供一种安全、高效的方式。”徐海峰表示。
深圳先进院医工所徐海峰团队的副研究员刘源、课题组硕士生黄静为共同第一作者,徐海峰副研究员为该文独立通讯作者。深圳先进院为该研究第一单位。
编辑 许家宜 审读 郭建华 二审 郑蔚珩 三审 刘思敏
 报料
报料 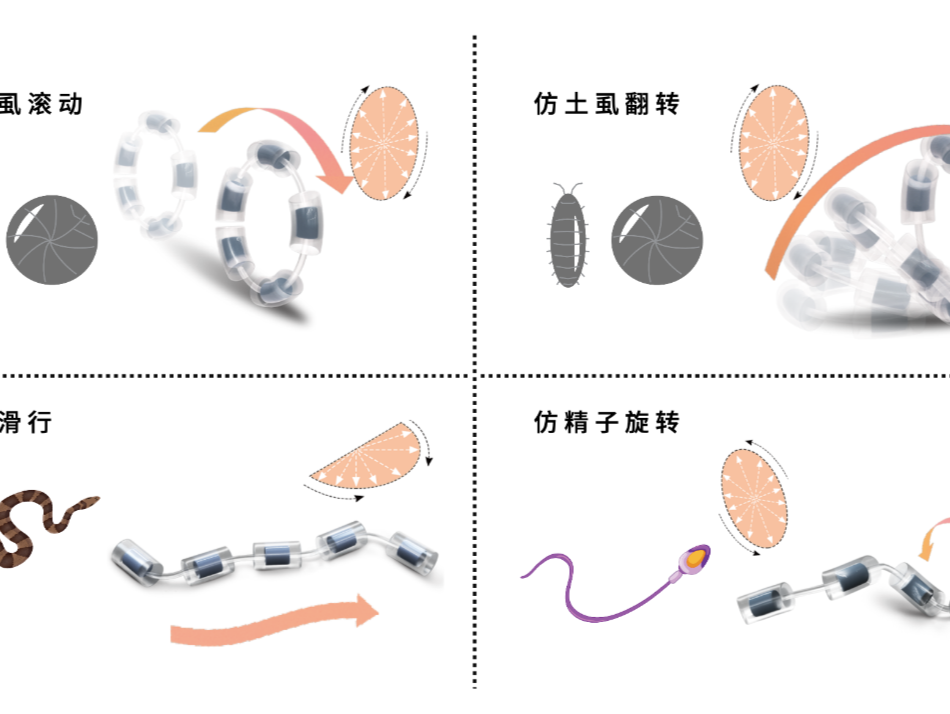


 读特热榜
读特热榜  IN视频
IN视频 




 鹏友圈
鹏友圈 




 iPhone客户端
iPhone客户端  安卓客户端
安卓客户端 
