
 搜索
搜索  数字报
数字报  深圳号
深圳号  投诉举报
投诉举报  读特新闻记者 马扬洋 葛墨含 文/图、视频
读特新闻记者 马扬洋 葛墨含 文/图、视频

视频剪辑 张越洋
5月19日下午,2024年“高质量发展调研行”广东主题采访活动来到南方科技大学,中央、省主要媒体70余人围绕“推进现代化产业体系建设、加快发展新质生产力”主题,采访调研了介观物理实验室、机器人研究院、办学成果展厅等,在座谈会上,院士代表、大科学平台代表等发言交流。

“变形金刚”变成现实
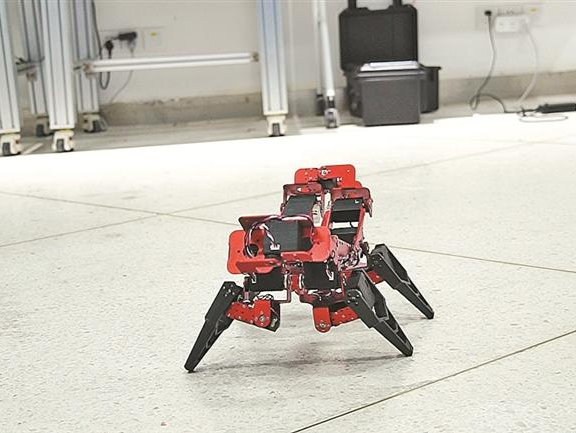
走进南科大机器人研究院,一款新型类生物机器人,在无需拆卸和重新组装的情况下可实现爬行动物、节肢动物和哺乳动物等不同生物形式的转换;它时而缩成一团,时而呈小狗状、蜘蛛状,能钻进狭窄通道,也能攀爬阶梯等障碍,还能根据音乐踩点跳舞。在现场参加调研的记者惊呼道:“这不就是变形金刚走进现实?”

南科大机器人研究院院长、英国皇家工程院院士、欧洲科学院院士戴建生介绍,这款“变形金刚”叫作变胞机器人。据了解,虽然人工智能高速发展,但是机器人本体结构几十年不变。而环境的多变性、生产的多格局、新质生产力的高端需求,迫切需要机器人结构的改变。

依据这些需求,戴建生院士带领的团队在国际上提出智能结构进化机器人,在机器人的结构上进行颠覆性的创新。团队开发的第一代进化机器人通过本体结构设计,实现了机器人构型的转变,能够模仿不同哺乳动物和节肢动物的形态特征和运动特点。
“在第二代全息进化机器人中,我们拓展了机器人的结构尺寸,搭载了多种传感器件,包括深度相机、雷达和红外相机,将智能变胞结构、人工智能和多种感知技术高度融合,突破现有机器人结构固定、功能单一和智能化程度低的难题,提出智能变身的颠覆性技术。”戴建生院士介绍,团队研发出了国际首创具身智能全息变胞机器人,具备轮式、足式和轮-足复合式3种主要运动形式,包括5种仿生构型和120+细分形态,实现机器人结构、感知、决策与环境的高度融合。
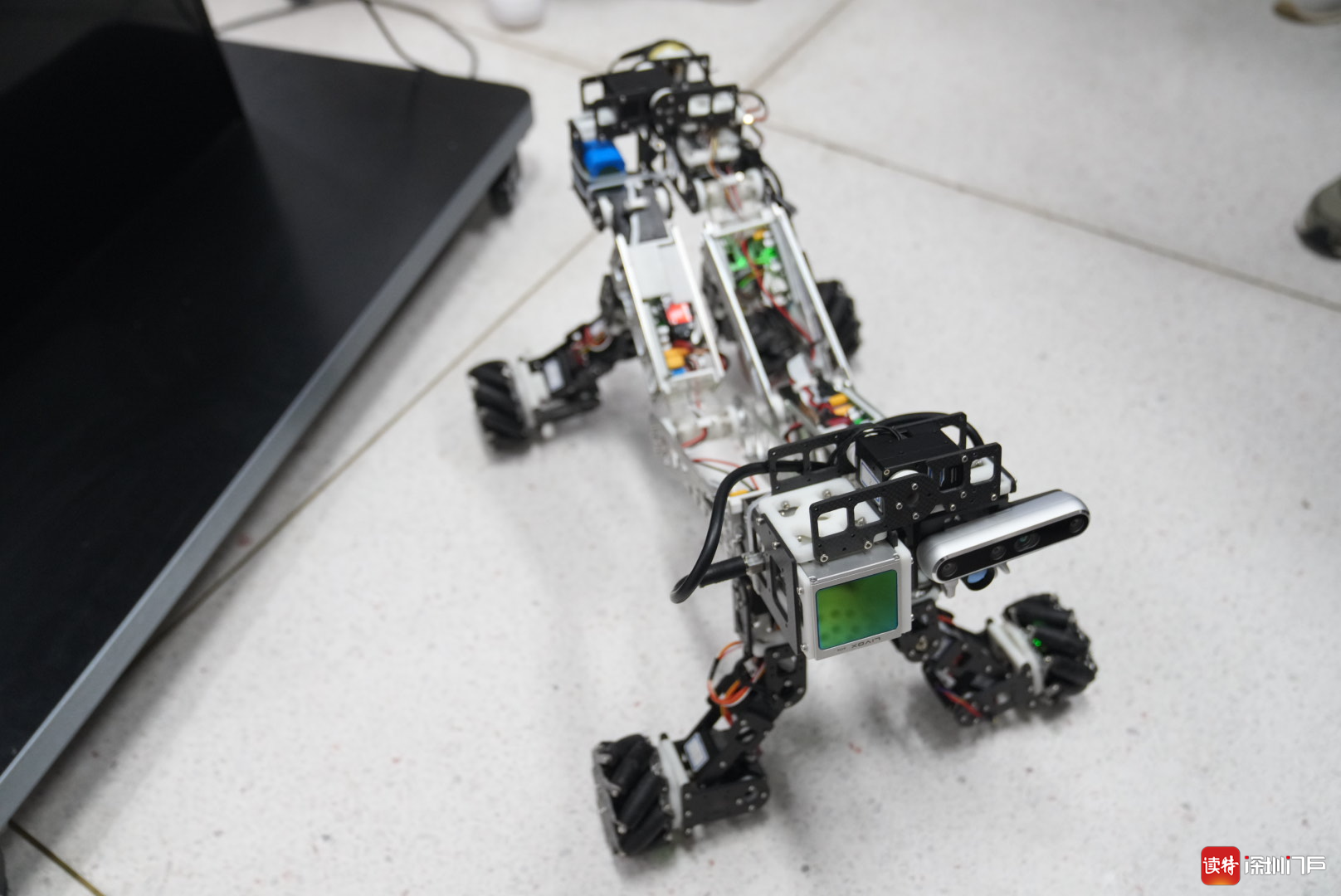
据悉,研究计划在随身载物平台、穿越废墟灾后搜救、场地火灾隐患巡检、野外水源地水质检测、野生动物疫源检测等多个场景应用,开拓了机器人领域新方向,引领智能结构进化机器人发展。“举个简单的例子,理论上随着研究的推进,飞机可以变成汽车,汽车可以变成飞机,真的就像变形金刚一样。”戴建生院士笑着说。
国际首创变胞类人手双臂操作
在南科大机器人研究院的角落内,一双高度灵巧的“机器人手”十分引人注目。在机器人手前,戴建生院士说道:“我们团队在国际上首次将变胞结构应用于机器人手掌设计,使得机器人手更符合人手操作,更人性化。这个类人手突破现有机器手抓持空间与灵巧度约束,结合智能算法和电子皮肤技术,实现类人手与机械臂的视觉交互和触觉感知,创建国际首创类人变胞灵巧手-机械臂协同技术。”

读特新闻记者采访得知,这一类人手拥有欧洲专利、中国专利与国际 PCT 专利。通过结构设计和钛合金3D打印技术,团队实现了灵巧手结构紧凑和高负载的特点,融合了灵巧手的力触觉反馈、环境温度感知和机械臂的运动轨迹的智能化控制,完成了灵巧手的数字孪生建模,拓展了手臂协同的具身智能应用,实现了人形机器人灵巧手的自适应操作和智能交互,引领着人形机器人本体结构的发展。
戴建生院士的2023级硕士生陈祈告诉读特新闻记者,该“机器人手”应用场景丰富,“在家庭场景下,机器人手可以整理衣物、陪孩子搭积木。也可以作为厨房的助手,比如用户需要60°C的水温,机器人就可以将‘手’伸进去,无痛精准测试水温。再比如老人摔倒了,机器人手可以将老人从高层托抱下来。生产线的应用场景也同样很多。”

据了解,南科大机器人研究院由戴建生院士牵头,通过跨学科、跨领域、跨院系,集合了4学院10系的优秀科研学者,现有核心研究成员40人。机器人研究院围绕变胞结构进化机器人、软体机器人、足式机器人、人形机器人——具身智能机器人、医疗康复机器人、水下机器人、微纳机器人、智能感知、人工智能与人机交互、产业机器人十大平台,进行世界前沿科学研究并取得重大突破。目前在研项目有国家级项目23项、省部级项目11项、市级项目23项、校企联合实验室13个。
编辑 钟诗婷 审读 伊诺 二审 关越 三审 张露锋
 报料
报料 


 读特热榜
读特热榜  IN视频
IN视频 




 鹏友圈
鹏友圈 






 iPhone客户端
iPhone客户端  安卓客户端
安卓客户端 
