
 搜索
搜索  数字报
数字报  深圳号
深圳号  投诉举报
投诉举报 9月2日0时33分,神舟十四号航天员出舱活动取得圆满成功。此次任务中,由哈尔滨工业大学和中科院长光所联合研制的小机械臂将航天员准确、稳定转运至作业点,运动灵活、定位精准,其优异表现极大地提高了出舱作业效率,全过程顺利圆满,为后续系列舱外作业奠定坚实基础。
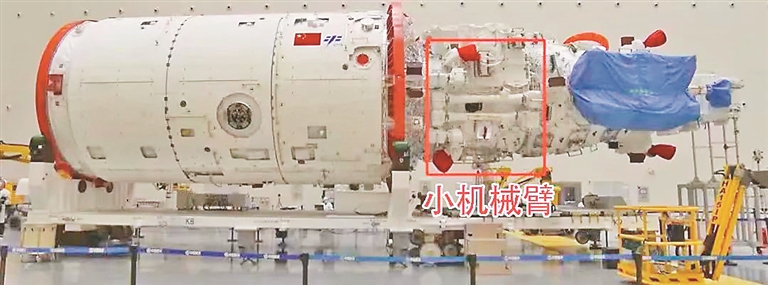
空间站实验舱小机械臂发射状态。
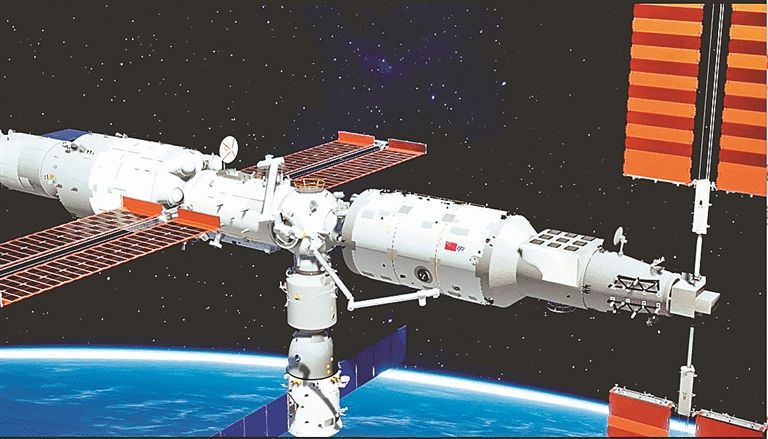
组合机械臂。
作为空间站“明星”部件之一,相比于大机械臂,小机械臂有哪些优势?据哈工大相关科研团队负责同志介绍,问天实验舱的小机械臂长约5米,最大负载3吨,相比于核心舱配备的大机械臂,小机械臂更加精巧,它采用7自由度对称构型,两端各有一个末端作用器,配合问天实验舱表面的“脚印”,可实现舱体不同位置的爬行。同时,问天实验舱小机械臂末端定位精度更高,位置精度优于大机械臂5倍,姿态精度优于大机械臂2倍,相较于大机械臂,它可用于完成精度要求更高的科学载荷安装、拆卸等任务。

对比大臂的精度优势。

科研人员正在安装小机械臂上舱。
此外,小机械臂可单独使用,也可与大机械臂形成组合机械臂,执行大范围、跨舱段的支持航天员出舱活动、舱外状态检查、舱外货物转移及安装、舱外维护维修、载荷照料、光学设施维护等任务。哈工大相关科研团队负责同志表示,后续,小机械臂还将与大机械臂完成首次太空“握手”,两臂对接后长度可达15米,扩展机械臂触达范围与距离,为将来完成高难度、多样化任务奠定基础。
(图片由哈工大提供)
(原标题《揭秘!哈工大联合研制“小机械臂”的“大本领”》)
见习编辑 秦涵 审读 吴剑林 审核 范锦桦
 报料
报料 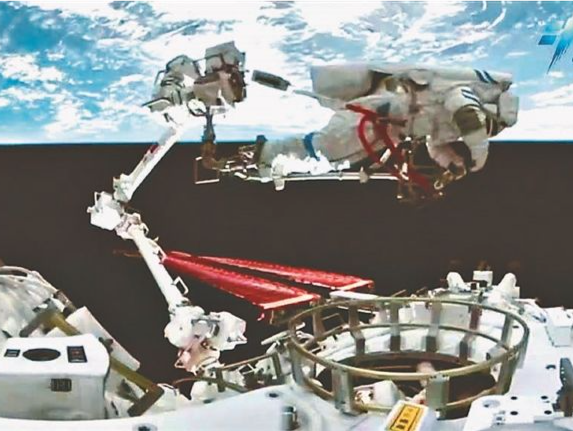


 读特热榜
读特热榜  IN视频
IN视频 




 鹏友圈
鹏友圈 





 iPhone客户端
iPhone客户端  安卓客户端
安卓客户端 
